
본 포스팅은 KFQ 한국품질재단 인공지능 개발자 교육과정 최종 프로젝트의 구조도입니다.
https://github.com/IIBlackCode/KFQ_FinalProject.git
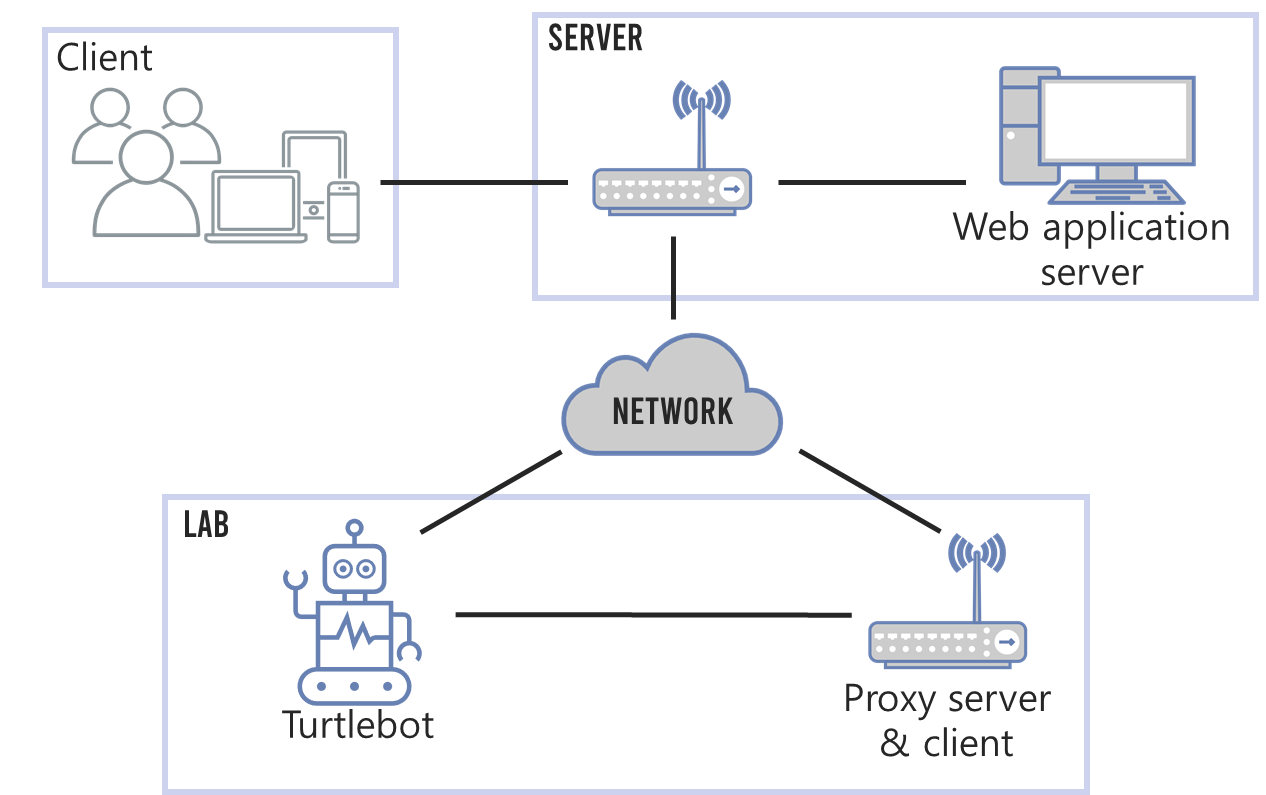
- 로봇 하드웨어 Turtlebot - Proxy Server의 ROS 통신
- 센서 데이터 등의 각종 토픽 메세지 전송
- Proxy Server - Web Application Server의 Web Socket 통신
- Turtlebot 카메라 모듈 - WAS의 Web Socket 통신
- opencv 활용
- Web Application Server - Client
- 학습한 AI 모델 Inference를 포함한 웹 서비스 제공
- Client는 웹 서비스에서 로봇의 제어권과 모니터링을 포함한 관제권 획득
- Client의 로봇에 대한 제어는 다시 WAS - Proxy - Turtlebot으로 전달
ROS를 활용한 이기종 디바이스간의 통신도 처음으로 도전해보는 것이었기 때문에, 두려움이 있었습니다.
다행스럽게도 팀원들과 멘토님의 도움으로 통신구조에 대해 더욱 이해하고, 구현할 수 있었습니다.
프로젝트 진행 기간
- 2021년 7월 31일 토요일 ~ 11월 5일 금요일